VEAMOS SOBRE MOMENTO ....
Considere una fuerza F que actúa sobre un cuerpo rígido .
Como se sabe, la fuerza F está representada por un vector que define la
magnitud y su dirección. Sin embargo, el efecto de la fuerza sobre el cuerpo
rígido también depende de su punto de aplicación A. La posición de
A puede definirse de manera conveniente por medio del vector r que une
al punto de referencia fijo O con A; a este vector se le conoce como el
vector de posición de A.* El vector de posición r y la fuerza F definen el
plano mostrado en la figura.
El momento de F con respecto a O se define como el producto vectorial
de r y F:
M0 = r x F

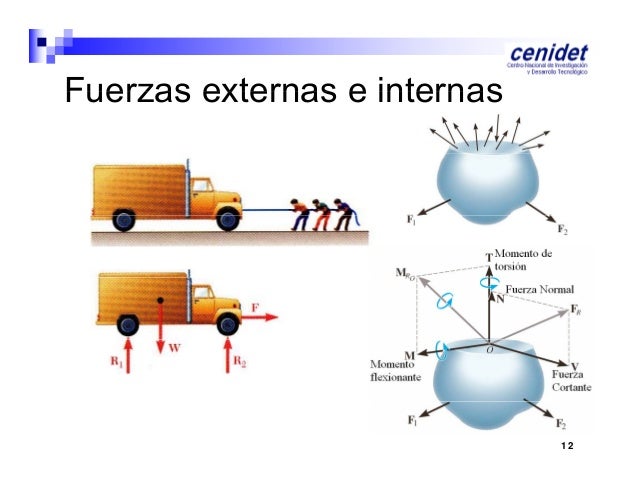
De acuerdo con la definición del producto vectorial , el momento M0 debe ser perpendicular al plano que contiene
el punto O y a la fuerza F. El sentido de M0 está definido por el
sentido de la rotación que haría al vector r colineal con el vector F; un
observador localizado en el extremo de M0 ve a esta rotación como
una rotación en sentido contrario al movimiento de las manecillas del
reloj. Otra forma de definir el sentido de M0 se logra por medio de la
regla de la mano derecha: cierre su mano derecha y manténgala de
manera que sus dedos estén doblados en el mismo sentido de la rotación
que F le impartiría al cuerpo rígido alrededor de un eje fijo dirigido a
lo largo de la línea de acción de M0 ; su dedo pulgar indicará el sentido
del momento M0.
Por último, representado con 6 el ángulo entre las líneas de acción
del vector de posición r y la fuerza F, se encuentra que la magnitud
del momento de F con respecto a O está dada por
M0 = rF sen o = Fd
donde d representa la distancia perpendicular desde O hasta la línea de acción de F. En virtud de que la tendencia de la fuerza F a hacer girar al cuerpo rígido alrededor de un eje fijo perpendicular a la fuerza depende tanto de la distancia de F a dicho eje como de la magnitud de F, se observa que la magnitud de M0 mide la tendencia de la fuerza F a hacer rotar al cuerpo rígido alrededor de un eje fijo dirigido a lo largo de M0 . En el sistema de unidades del SI, donde la fuerza se expresa en newtons (N) y la distancia se expresa en metros (m), el momento de una fuerza estará expresado en newtons-metro (N • m). En el sistema de unidades de uso común en Estados Unidos, donde la fuerza se expresa en libras y la distancia en pies o en pulgadas, el momento de una fuerza se expresa en lb . ft o en lb . in. Se puede observar que a pesar de que el momento M0 de una fuerza con respecto a un punto depende de la magnitud, la línea de acción y el sentido de la fuerza, dicho momento no depende de la posición que tiene el punto de aplicación de la fuerza a lo largo de su lí nea de acción. En consecuencia, el momento M0 de una fuerza F no caracteriza a la posición del punto de aplicación de F.

RECORDEMOS QUE .....
si el momento va en sentido horario entonces su signo sera (-) negativo.
si el momento va en sentido antihorario su signo es (+) positivo.
M0 = rF sen o = Fd
donde d representa la distancia perpendicular desde O hasta la línea de acción de F. En virtud de que la tendencia de la fuerza F a hacer girar al cuerpo rígido alrededor de un eje fijo perpendicular a la fuerza depende tanto de la distancia de F a dicho eje como de la magnitud de F, se observa que la magnitud de M0 mide la tendencia de la fuerza F a hacer rotar al cuerpo rígido alrededor de un eje fijo dirigido a lo largo de M0 . En el sistema de unidades del SI, donde la fuerza se expresa en newtons (N) y la distancia se expresa en metros (m), el momento de una fuerza estará expresado en newtons-metro (N • m). En el sistema de unidades de uso común en Estados Unidos, donde la fuerza se expresa en libras y la distancia en pies o en pulgadas, el momento de una fuerza se expresa en lb . ft o en lb . in. Se puede observar que a pesar de que el momento M0 de una fuerza con respecto a un punto depende de la magnitud, la línea de acción y el sentido de la fuerza, dicho momento no depende de la posición que tiene el punto de aplicación de la fuerza a lo largo de su lí nea de acción. En consecuencia, el momento M0 de una fuerza F no caracteriza a la posición del punto de aplicación de F.
RECORDEMOS QUE .....
si el momento va en sentido horario entonces su signo sera (-) negativo.
si el momento va en sentido antihorario su signo es (+) positivo.

{kind=link}